












豊洲周辺の湾岸エリアに拠点を構える竹中工務店、芝浦工業大学、NPO法人江東区の水辺に親しむ会などの地元組織は力を合わせ、「ミズベリング@イーストベイ東京プロジェクト」として水辺地域のブランド向上を目指しています。
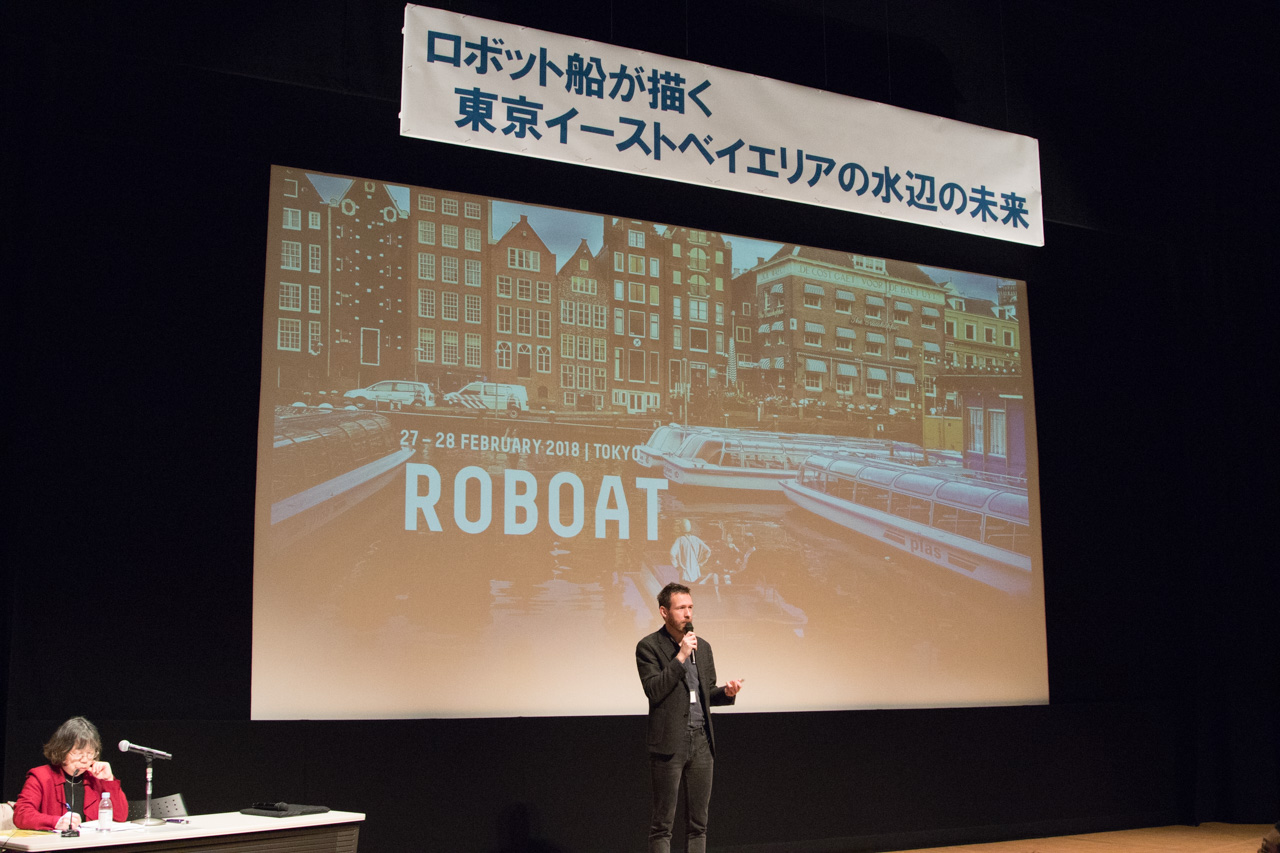
ミズベリングはその活動のひとつとして2018年2月28日、豊洲で「ロボット船が描く東京イーストベイエリアの水辺の未来」と題したシンポジウムを開催しました。運河や海で実現可能な未来が一体どんなものか、ぜひ知りたいと思う多くの方で会場は埋め尽くされました。
交通や観光といったさまざなまシーンで運河の活用が進んでいるオランダ・アムステルダムからはAMS先端都市課題研究所のステファンさん、マサチューセッツ工科大学のセンサブルシティラボからはエリンさんがゲストとして来日し、最先端のロボット「ROBOAT(ロボート)」の可能性を訴えました。
【登壇者】
- オランダ「AMS先端都市課題研究所」 Stephan van Dijk
- マサチューセッツ工科大学「センサブルシティラボ」 Erin Schenck
- ミズベリングプロデューサー 山名清隆
- 芝浦工業大学 建築学科教授 志村秀明
- 東京海洋大学海洋工学部 清水悦郎(教授)、 近藤逸人(准教授)
- 竹中工務店専務執行役員 佐々木正人
※当記事は「ロボット船が描く東京イーストベイエリアの水辺の未来」のレポート記事です。事前に竹中工務店の担当者さんから直接ご連絡を受けて、取材・写真撮影の許可を得ています。
【基調講演】オランダ「AMS先端都市課題研究所」 Stephan van Dijk氏
まず基調講演で立ったのはオランダ・AMS先端都市課題研究所のステファンさん。

「2014年にアムステルダム市が設立したAMS先端都市課題研究所はテクノロジーを用いてどうやって街を改善していくかをミッションとしています。その一例がモビリティー、アクセシビリティーです」と言います。
特にここ最近では自動運転技術がかなり開発されてきていて、
「道路のスペースがないアムステルダムでどこに新しい車両を走らせるかの実験が行われています。そして、街の総面積の25%を占めている運河の活用が鍵になっている」と指摘。
運河を使った新たな交通、観光、輸送。そういった背景があって「ROBOAT」の開発が進められました。
マサチューセッツ工科大学「センサブルシティラボ」 Erin Schenck氏
マサチューセッツ工科大学(MIT)は日本との連携では長い歴史があり、新しい教育を推進するジャパンプログラムは先日35周年を迎えたんだそうです。

同大学センサブルシティラボのエリンさんは
「MITのセンサブルシティラボが掲げるミッションは人々とデジタルスペースを結びつけ、街の未来を作っていくことです。都市のモビリティーやトランスポーテーションなどさまざまなプロジェクトがあります。インフラである橋をもっと効率的にするとか、下水管の改善につながる調査など、現場でのフィールドワークも多く実施しています」と説明。
また、シンポジウム会場にはアムステルダムの運河が映った映像が流れ、運河のなかで人々やモノを運ぶプラットフォームついて説明が行われました。

「ROBOAT」は自動運転で人を運ぶのではなく、モノも運べるし、商品を並べて一時的に路面店のような簡易店舗にもできます。
「新しい技術は活用されなければ意味がありません。アムステルダムではゴミの回収が問題になっているのですが、ゴミ箱をROBOATで運搬すれば解決。ROBOATは街がこれまで抱えてきた問題の解消につながるんです。また、既存のタクシーボートもROBOATで引っ張ることで自動化が可能になります」
と、新技術は既存のサービスへも十分活用できることをアピールしました。
そして、緊急時には複数のROBOATがつながることで橋のようになり、川を渡れるインフラにもなる!これは実現不可能ではないでしょうし、もはや夢ではない気がしました。
ROBOATは実装したパーツによって前後だけでなく左右にも動作可能です。Wi-Fi、モバイルビーコン、GPSなどを搭載し、指示されたパスを辿っていき、たとえ途中に障害物があったとしても自動的に避けて走行できる特徴を持っています。

実はこのROBOAT、前日には東京のマリーナで実験が行われたんだとか!指示したとおりに四角を描きながらコースをしっかり走行した、という結果を映像で見せていただきました。
ミズベリングプロデューサー 山名清隆氏
そもそもミズベリングとは何か?モデレーターのミズベリングプロデューサー山名清隆さんは
「川や運河などの水辺を活用し、ワークショップやイベントなどを通じて人々がつながったり、新しい出会いが生まれたりする場を提供している」と説明しました。
川は新しい想像力が生まれるところであるとし、ミズベリングは川の仕事をする人たちの自信と誇りを回復させたいと考えているそうです。
水辺を開拓し、水辺を楽しむ。何かしてはいけない空間を、何かしてもいい空間にしたい、と。
芝浦工業大学 建築学科教授 志村秀明氏
水辺である豊洲が本拠地である芝浦工業大学。水彩まつりや船カフェを開催しています。2009年には豊洲地区運河ルネサンス協議会が発足し、地域が一体となって地域のにぎわいを作っています。

芝浦工業大学の志村秀明教授は「ROBOATへの期待は船舶としてではなく、インフラとして船の簡易船着場にできないかと期待。また、船舶免許を持たない人々の活動を促進できたり、カヌーやアクセスディンギーなどに活用できそうだ」と考えています。
「ROBOATが走ることで運河のパトロールや内部河川の水質改善、災害対応や物資・人の移動にも役立つ。人とロボットの連携で街づくりへ。ぜひ、東電堀でROBOATを実験したい」とのこと。
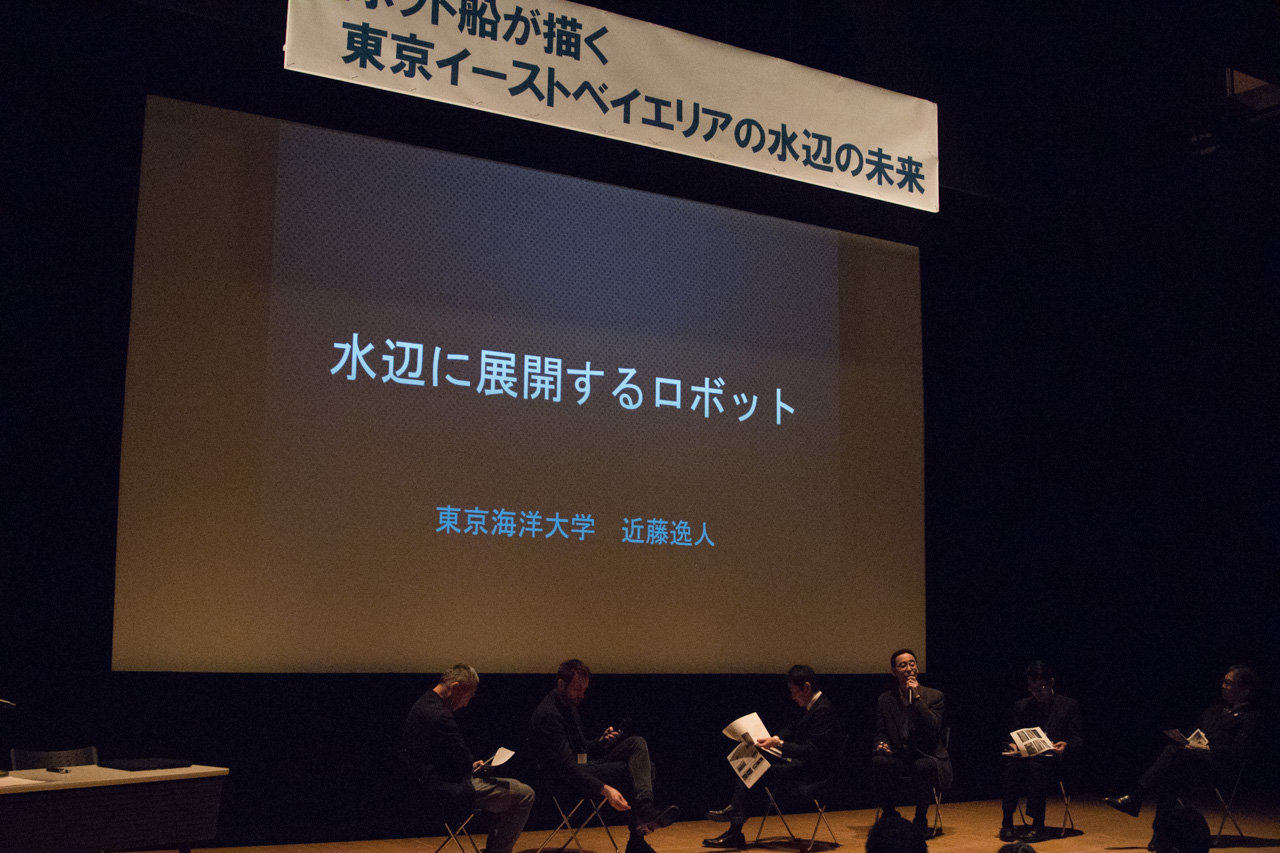
東京海洋大学海洋工学部 准教授 近藤逸人氏
続いて東京海洋大学海洋工学部の近藤逸人准教授によるお話。
「水辺で展開するロボットには探査や開発など極限領域のロボットと、サービスやエンタテインメントなど生活空間で活躍するロボットがあります」と、水中ロボットができることを説明。
「自動で水中に潜って、橋脚を360°ぐるっと周りながらカメラで点検するといったインフラの点検ができます。また、魚の養殖でも活躍可能。沿岸ではなく沖合で養殖できるよう実験が進められています。ロボットが仲間であると、魚を手なづける実験も」
と、実際にロボットの後を魚が追いかけてくる映像が流れました。水中、水上、空中、すべての場所で連携していくのが水辺の活用につながるんじゃないかと考えているそうです。
東京海洋大学海洋工学部 教授 清水悦郎氏
同じく、東京海洋大学海洋工学部の清水悦郎教授は
「無人運転・自動運転の安全性について、無人で動くゆりかもめの水上版のようなものを実現できないか?そもそも人が運転するのって安全なの?を考えています」と、ちょっと違った角度からロボットの活用法をお話してくれました。

「実は海難事故の75%以上は人為的要因で、見張りの不十分によって発生した事故は20%もあります。自動化技術は人の仕事を奪うものではなく、安全や人を助けるための技術。排ガスの出ない無人水上バスによる都市交通システムを目指したい。観光だけでなく、日常の足になるような交通システムを作りたいです」
そのためのシステムとして必要なのは無人技術で、人を使わず災害時にも運転手を犠牲にすることなく無人化技術が必要。また、管制室、管制室と無線でつなぐ通信網の整備なんだとか。ただ単に水辺で使えるロボットを作るだけじゃダメということなんですね。
海洋大学では2010年からバッテリーで走る船を開発し、豊洲周辺で実験的に走らせていることも教えてくれました。ただ、自動運転にはどうしてもたくさんの法律が障害になってくるそうで、「法律や国際ルールの改善が必要」と訴えました。
竹中工務店専務執行役員 佐々木正人氏
東京イーストベイ構想を打ち出す竹中工務店専務執行役員の佐々木正人さんのお話。
「東京イーストベイ構想の活動は国土交通省のミズベリング・プロジェクトと連携しながら展開しています。ROBOATなど水辺の活用ではまだまだ問題があるなと思いました。技術だけでなく法的に見直さないといけない部分も多いです」

しかし、将来的には大きな期待が持てると言います。
「ここ5年、10年で新しい水辺が誕生すると期待しています。東京臨海東部は観光エリアとしては空白エリアです。このミズベリングの地域は水門に囲まれていて波の来ない水域が多く、内陸部には文化資源や産業資源がたくさんあります。また、都心から2〜8kmと利活用しやすい場所です」
さらには
「将来的にはリノベーションで既存の工場や鉄道廃線を活用したり、水辺を活用して賑わいにつなげる。また、交通網を作って賑わいにつなげ、その結果、環境に優しい防災機能のある街にすることができます」
と、豊洲など湾岸エリアのさらなる発展と安全性についてを語りました。会場で聞いている皆さんがワクワクするような内容だったと思います。
クロストーク
後半には全員が肩を並べてのクロストークが行われました。

左から
- ミズベリングプロデューサー 山名清隆(モデレーター)
- オランダ「AMS先端都市課題研究所」 Stephan van Dijk
- 芝浦工業大学 建築学科教授 志村秀明
- 東京海洋大学海洋工学部 近藤逸人(准教授)
- 東京海洋大学海洋工学部 清水悦郎(教授)
- 竹中工務店専務執行役員 佐々木正人
そのなかで気になった話題が「川沿いをなんでもかんでも柵で入れなくするのはもったいない」といった部分でした。
ステファンさん
「(東京での水辺活用の可能性は)あります。人々は水が好きですから、市民や観光客にオープンとなれば可能性はすごくあります。ROBOATをプラットフォームと見ると面白いんですが、都市計画の観点からスーパーフレキシブルなツール。どこにでもパッと持って行ってすぐに使えます」
芝浦工業大学 建築学科教授 志村秀明さん
「水辺で桜を見るってすごくいいなと。でも子どもがいる人からみると水に子どもが落ちるとか、すぐ柵を作るとかなっちゃう」
モデレーターの山名さん
「柵がないだけで街の風景がガラリと変わると思んですよね」
志村さん
「市民を巻き込んで、一緒にやっていくことが重要。じゃないと定着しない。都内は柵だらけ。市民の理解を得られるように、一緒にやっていかないとダメ」
ステファンさん
「ぜひ市民の方々を招いてROBOATを見せて、意見を聞いてみたい。そこから生まれたアイディアに期待し、そういった声から使い方が生まれるんないかと思います」
と、締めくくりました。
なるべく多くを伝えたいと思い、過度な編集はせずに記事化しましたが、それでも文量の都合で載せられなかった部分もあり、どこを取っても非常に濃い内容のシンポジウムでした。豊洲周辺の水辺がどうなっていくのか、私達もどう協力できるか、いろいろと考えさせられます。皆さんはどう思いましたか?
約2時間という短い時間で登壇者のみなさんは話し足りない印象を受けましたが、ぜひ第2回、第3回と続けて開催していただきたいです!
→ ミズベリング@イーストベイ東京プロジェクトFacebookページ

